08. Minkowski Sum C++
Now that you've learned the Minkowski Sum , you'll get a chance to code it in C++!
Example
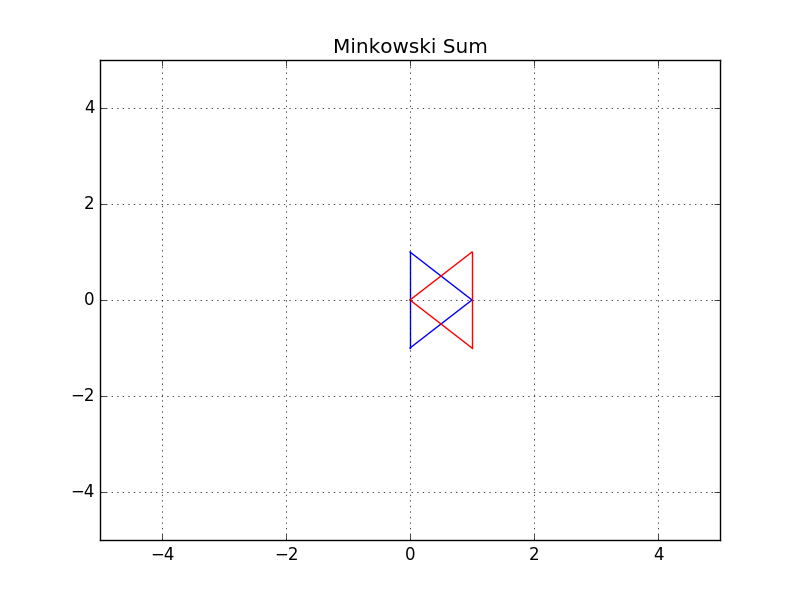
In this example, you can see two triangles - a blue and a red one. Let's suppose the robot is represented by a blue triangle and the obstacle is represented by a red triangle. Your task is to compute the configuration space C of robot A and obstacle B in C++.
- Robot : Blue triangle denoted by A
- Obstacle : Red triangle denoted by B
Minkowski Sum C++
Task Description:
Here are the steps that you should follow in order to code the Minkowski Sum in C++. Check them off as you complete them!
Task Feedback:
Great Job! Now submit your answer.
Start Quiz:
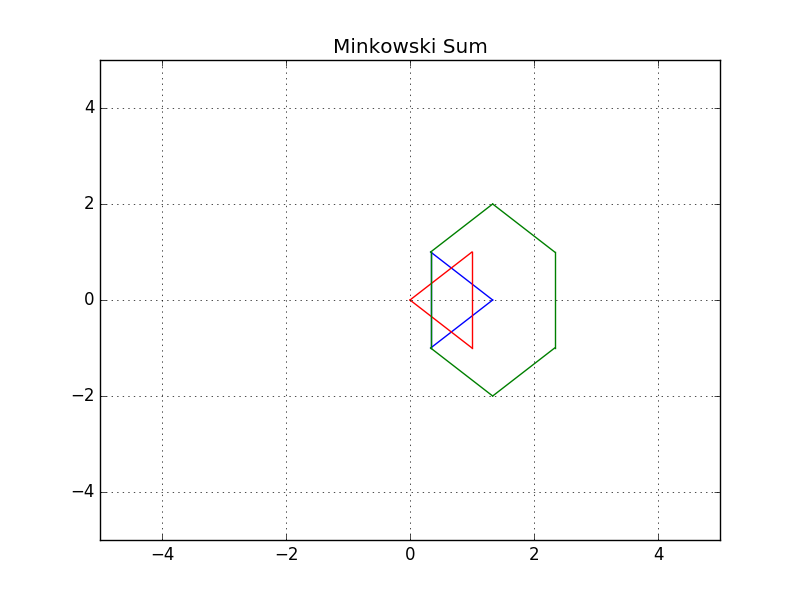
Generated Configuration Space
Translation
You successfully coded the Minkowski sum in C++ and generated the configuration space. You can easily notice that the red obstacle is not well inflated and the blue robot can still hit the obstacle. That's because the configuration space still has to be shifted to the obstacle.
Initially, the robot should be translated to the obstacle, and then after computing the configuration space, it should be translated to both the robot and obstacle.
Final Result
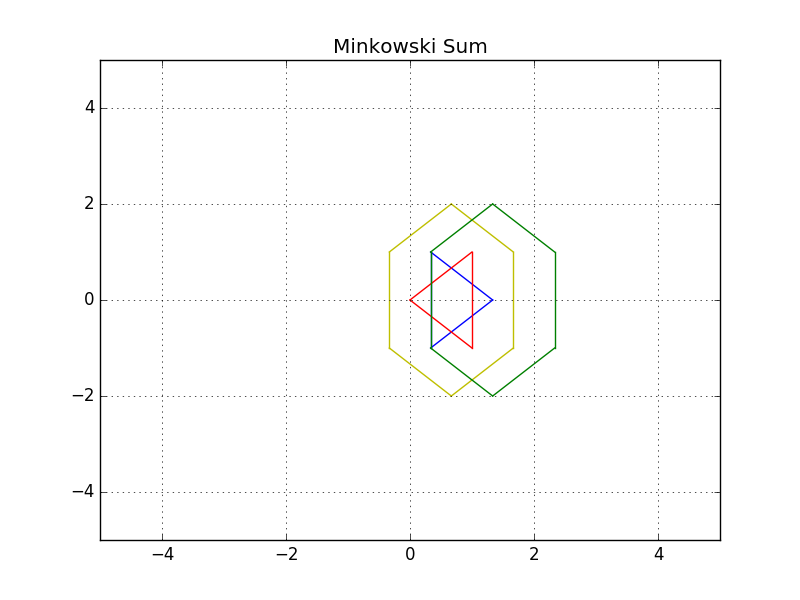
Above is the resulting image where both the blue robot and the green configuration space have been shifted. You can now see the yellow padding which represents the translated configurations space all around the red obstacle. The blue robot will never be able to hit the red obstacle since it's well inflated.
Plotting
If you are eager to know how I generated these plots and translated the shapes, you can clone the GitHub repo and read through the C++ code. In short, I had to follow these steps to generate any polygon:
- Computed the centroid of each polygon
- Computed the angle of each point-centroid with respect to the x-axis
- Sorted the points in ascending order of their angles (clockwise)
- Plotted a line between each consecutive point